Labeling Human Actions in Drone Videos

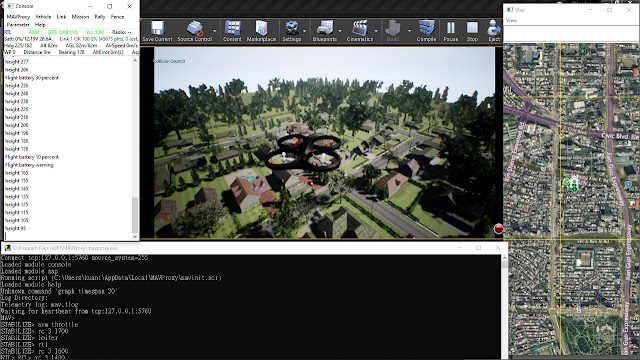
In this blog we will show you how to label actions in drone videos, as shown in the video below: https://www.youtube.com/watch?v=y05iJ0vMnuI We use Microsoft VoTT as our labeling tool. The summary of labeling steps are listed as follows: ' Install Microsoft VoTT v2.1.0 ( link ) or NTUT VoTT v0.0.5 ( Windows ) Add security token to VoTT Name : NTUTDrone Token Key : qITjd1Rj6hFqC7uB0OGxPKYVxIFSdcMrprQAMS5rEhc= Download Drone videos ( DroneVideos ) and labeling projects ( VoTT Projects ) Create two folders: C:\Drone_Target\ and C:\Drone_Source\ Put VoTT project to C:\Drone_Target\ Put drone video to C:\Drone_Source\ (Make sure ONLY project videos in this folder) Open VoTT project file ( C:\Drone_Target\Drone_001.vott ) Label and check actions ( action_lists ) ( Check Labels ) Let's see the detailed steps now. 1. Install Microsoft VoTT Download VoTT from GitHub ( https://github.com/microsoft/VoTT/releases ). Install and open VoTT 2. Add securit...